Автоматизированная система управления или Работа двигателя и управление его работой в понимании обыкновенного автомобильного Диагноста,- статья из города Белгорода, часть 4
24.06.2009
двигателя и управление его работой в понимании обыкновенного
автомобильного Диагноста"
Продолжение и поправки
Оказалось, что изложенный материал не всеми понят. Причины подсказаны.
1) 1.Стиль изложения.
2) 2.Когда читается материал, то напрягает уже одно то, что пытаешься понять написанное. Наличие графиков еще больше усугубляет ситуацию. Особенно когда идет ссылка на график, который уже остался где-то позади.
3) 3. Новые термины должны быть вынесены в начало и если было графическое изображение, то оно должно повторяться , где на него опять же идет ссылка.
4) 4.Различный уровень подготовки
5) Попробую исправить и дополнить. Кроме того будет нужна детализация каких-то моментов.
6) Начнем с сигналов датчиков.
7) В автомобиле система управления использует данные различных датчиков.
Принцип действия и сигналы датчиков различны. На практике мы имеем дело с двумя видами сигналов:- сигналами аналоговыми и импульсными последовательностями. Сигналы управления , вырабатываемые самой системой , могут быть как импульсными последовательностями, так и одиночными импульсами. Сигналы же от датчиков могут быть аналоговыми или импульсными последовательностями. И никогда не будут в виде одиночного импульса.
8) Аналоговые сигналы.
9) Это непрерывные сигналы, существующие в период определенного времени.
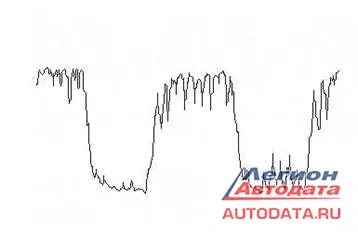
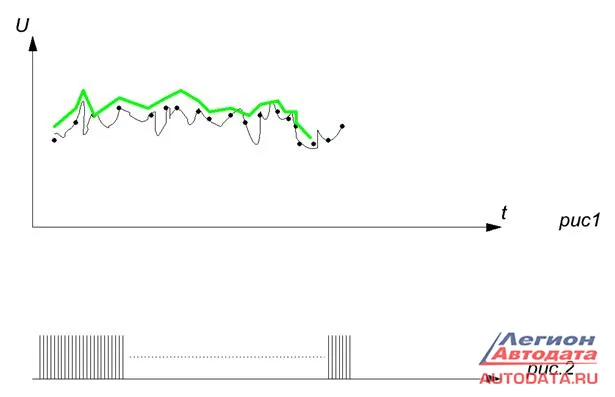
Примером аналогового сигнала может служить сигнал от ДК.(рис.1)
10) Он существует в период времени, с момента запуска двигателя до момента его остановки.
11) Значения этого сигнала меняются, но он остается непрерывным на протяжении всего промежутка времени
12)
13) Аналоговыми сигналами будут сигналы от датчиков температуры, TPS, MAF, MAP и т.д.
14) Импульсные последовательности будут иметь на своем выходе датчики считывающие угловые положения механизмов двигателя: датчик положения КВ, датчик положения РВ, а так же датчик скорости(если такой предусмотрен отдельно), датчик ABS и т.д. Импульсная последовательность отличается от аналогового сигнала. Да, она также идет непрерывно в тот же промежуток времени, что и аналоговый сигнал. Но в импульсной последовательности есть четко обозначенные точки, где сигнал прерывается, а затем опять появляется. Примером дискретного сигнала может быть одиночный импульс I(U). (Рис.2)
15)
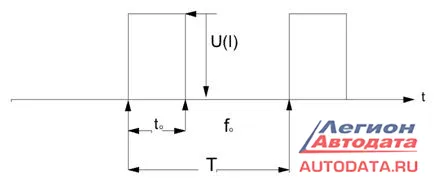
16) На рис.2 видны точки начала и конца импульса. Эти точки обозначают передний и задний фронты импульса. Временной промежуток между ними - называют длительностью импульса. Это основной параметр одиночного импульса. Одиночные импульсы, следующие друг за другом в определенный период времени - называют импульсными последовательностями. В импульсной последовательности, появляются временные промежутки между тем, когда действует первый импульс и тем когда начинает действовать следующий за ним. Чаще (и правильнее) называются точки:- передний фронт первого импульса и передний фронт следующего за ним импульса. Этот временной промежуток обозначен на рис.2 « Т». И называется этот промежуток времени периодом повторения. Это основной параметр импульсной последовательности. Есть еще понятие частота следования импульсов. На рис.2 это временной промежуток обозначен «f0».Это временной промежуток между точкой заднего фронта первого импульса и точкой переднего фронта следующего импульса.
17) Таким образом, если сигнал, действующий в определенный период времени непрерывен - это сигнал аналоговый. Если сигнал действует в определенный период времени и имеет прерывистые значения - это сигнал дискретный. Прерывистость и есть дискретность.
18) Дискретизация сигналов от датчиков.
19) Дискретизация сигналов от датчиков - это выделение временных промежутков, которым будут соответствовать определенные значения исходного сигнала. Поскольку эти промежутки ничтожно малы по сравнению со временем действия исходного сигнала, их называют точками дискретизации. Поскольку частота, с которой выделяются точки дискретизации на исходном сигнале, очень высока, то за какой-то промежуток времени действия исходного сигнала, мы получаем его множественные мгновенные значения именно в точках дискретизации. Именно на мгновенные значения и ориентируется система, а не на весь сигнал целиком. Дискретизация исходного сигнала выполняется путем сложения его с импульсным сигналом генератора тактовой частоты. Сложение происходит по амплитуде в точках, где импульсы генератора тактовой частоты, совпадают с исходным аналоговым сигналом.
20)
|
21) Зачем выполняется дискретизация исходного сигнала от датчиков.
22) Для превращения сигналов от датчиков в более простой вид удобный для дальнейшей обработки и преобразований; для приведения различных сигналов к единому виду; для повышения точности, считываемых параметров; для упрощения самого процесса управления и анализа; для обеспечения достаточного быстродействия системы; для повышения достоверности информации. Это основное. Есть еще помехоустойчивость, устойчивость к воздействию внешних факторов на систему и т.д. Об этом упоминалось, и рассматривать дальше будем только основные требования. А это именно требования, предъявляемые к АСУ. Степень их будет различна и будет определяться видом и классом системы. Но при проведении преобразований исходных сигналов от датчиков, должно выполняться следующее условие:-можно приводить исходный сигнал к любому виду, но информация заложенная в первичном сигнале от датчиков должна полностью сохраняться, на любом этапе преобразования и не зависеть от степени(глубины) проводимых преобразований. Ибо исходный сигнал датчика – это исходная точка привязки системы управления к объекту управления ДВС. На рис.3 видно, что огибающая преобразованного сигнала полностью повторяет исходный сигнал(рис.1). И вместо импульсов датчика мы уже имеем пачки импульсов. Причем, период повторения, частота следования пачек импульсов, такая же, как и у импульсов исходного сигнала. Если увеличить обороты двигателя, то в исходном сигнале от датчика изменятся временные промежутки: длительность импульсов и период их повторения. Но тогда и рис.3 будет выглядеть по- другому: уменьшиться количество импульсов в пачках и уменьшиться количество тактов. Эти изменения произойдут во временные промежутки, обозначенные на рис.1 точками АВСD. И эти же изменения будут в этих же точках на рис.3. Здесь мы имеем преобразованный уже сигнал, но изменения сохранятся. И поскольку в импульсной последовательности рис.3 мы имеем одиночные импульсы одинаковой амплитуды и длительности, то единственный параметр который изменится, будет скважность. Таким образом, мы перешли к одному изменяющемуся параметру вместо двух, которые имели в исходном сигнале. Но самое главное - нет, не скважность, главное то, что таким образом система оказывается привязанной к ДВС через датчики по единственному параметру, который называется ВРЕМЯ.
23) При пояснении принципа дискретизации, используют графики импульсных сигналов. Это нагляднее и проще для восприятия.
24) Для пояснения принципа дискретизации сигнала, и привязки системы к механике двигателя я использовал именно такие графики , а также реальную пластину и шестерню. И все равно получилось не совсем понятно. Значит, упрощаю еще.
25)
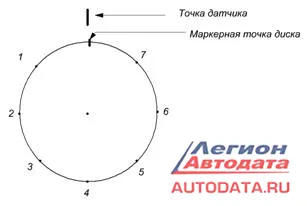
26) Обычный диск ни к чему не привязан. На диске имеется маркерная точка и 1-7 –точки информационные. Имеется точка, в которой датчик снимает информацию. Если диск вращать, то датчик последовательно выдаст информацию о прохождении всех точек. Маркерная точка диска будет отличаться от других точек, и поэтому при ее прохождении сигнал будет иметь другой вид, отличный от остальных точек. Получим ли мы информацию об угловых положениях диска при его вращении. Да, получим. Будет ли эта информация точна? В точках, обозначенных на диске – информация будет точной. А степень точности будет зависеть от того насколько точно мы выполнили разбивку диска. Если диск будет вращаться постоянно в течении какого-то времени мы получим последовательность сигналов, в которых будет содержаться информация об угловых положениях(точки 1-7), а информация о количестве полных оборотов диска,будет содержаться в количестве маркерных сигналов за определенный промежуток времени. Но кроме этого мы еще и будем иметь информацию о скорости вращения диска. Для прохождения каждой из точек на диске над точкой датчика требуется какое-то время. Промежутки между точками одинаковы. Следовательно, если скорость вращения диска увеличить, то временной промежуток между проходом каждой из точек на диске сократится.
27) Чем больше будет информационных точек на диске, тем точнее будут показания . Есть линейка , которой в магазинах отмеряют материю, есть инструментальная металлическая линейка, есть микрометр. Все эти инструменты хороши каждый для своего дела. Так и здесь. Для согласования механической части- механику достаточно установочных меток и отзывов.
Этого будет достаточно для согласования механической части ДВС. И делать точнее, вряд ли нужно. Но для системы такая точность неприемлема. А вот в качестве исходных данных зубья шестерни и промежутки между ними - вполне подойдут. Система разбивает (дискретизирует ) эти «промежутки и зубья» , определяя при этом дополнительные информационные точки. Можно взять линейку, которой отмеряют материю и, проведя «дискретизацию» сантиметровых отрезков на ней, сделать цену деления как на микрометре. Вот только нужно ли это.
28) Теперь немного о путанице, которая возникла при виде вот этого рисунка.
29)
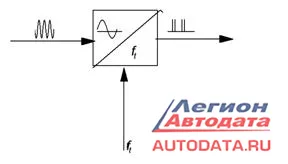
30) Ничего общего с модулятором в данном устройстве нет. Если не считать того, что есть два входа.
31) Работает это устройство следующим образом.
32) На один вход подается импульсная последовательность, на другой – импульсы генератора тактовой частоты. На выходе ограничитель.
33) Объясняю принцип сложения этих двух сигналов по амплитуде…. Проще уже не смогу.
34) Представьте себе две батарейки, с одинаковым выходным значением напряжения (пусть 5В).
35) И пусть у нас будет тот же диск , имеющий маркер и семь информационных точек. Этот диск вращается, и каждая его точка проходит датчик. Но вместо датчика мы поставим обыкновенную кнопку, которая будет замыкаться при прохождении каждой информационной точки на диске . При замыкании кнопки, батарейки будут подключаться последовательно и на выходе будет в момент замыкания уже 10В. А в момент размыкания 5В, поскольку одна из батареек будет подключена постоянно. И пусть та батарейка , которая остается подключенной постоянно ,будет выдавать импульсное напряжение. Что мы получим на выходе:
36)
37) На рис.1-это сигнал батарейки, которая подключается кнопкой.
38) Рис.2-это батарейка, которая, работает как импульсный источник питания постоянно.
39) Рис.3-батареки в момент включения кнопки соединятся последовательно.
40) Рис. 4- сигнал на выходе устройства после ограничителя амплитуды.
41) Рисунки1-2 –объяснений не требуют. Рис3.- я изобразил так, как будет выглядеть суммарный сигнал при сложении амплитудных значений. А поскольку такая «изгородь» из импульсов не нужна, то нужно из нее все лишнее убрать. Ограничение проводим по нижнему уровню 5В,это означает, что все что ниже этого значения будет срезано и останется только верхняя часть.(рис4).
42) А теперь вместо батареек поставьте реальные сигналы. Сигнал от датчика(рис.1);сигнал генератора тактовой частоты(рис.2); Преобразованный дискретный сигнал(рис.4).Как это устройство устроено – был такой вопрос. Да очень просто. И вариантов можно много привести. Самый простой- два ключа : на один подается сигнал от датчика на другой сигнал генератора тактовой частоты. Выходы с обоих ключей идут на согласующий каскад. Когда приходит импульс от датчика, то в период его действия происходит сложение амплитудных значений(батарейки соединяются последовательно),когда наступает промежуток- амплитудное значение равно амплитуде импульсов генератора тактовой частоты. Ограничитель –это тоже ключ, но срабатывает он только тогда, когда сигнал на его входе достигает определенного значения(в нашем случае 5В). Вот поэтому на рис.5 мы видим то, что выше, чем 5В в суммарном сигнале (рис.3). Ну и чтобы с этим уже насовсем покончить, скажу еще вот что- сигналы можно таким же образом и вычесть. Делается это просто – достаточно инвертировать сигнал генератора тактовой частоты по отношению к исходному сигналу. И в точках совпадения импульсов произойдет вычитания амплитудных значений. Поскольку сигналы будут находиться в «противофазе».(Никогда не употребляйте это слово. Правильно говорить прямой и инверсный(инвертированный) сигналы).
43) «Виртуальная шестерня»
44)
45) Собственно она нарисована на рис.3
46) На рис.1 показан ,промежуток «маркер» это то место где на шестерне отсутствует несколько зубьев. Дальше я нарисовал несколько импульсов и поставил пунктирную линию. Этим я хочу показать: Все импульсы по количеству зубьев шестерни я рисовать не буду(обороты не меняются, картинка будет одинаковая). Маркер- это сигнал системе о том что полный оборот КВ сделал. Так что на рис. 1-реальная шестерня.
47) А на рис.3 «виртуальная». А «зубья» этой шестерни пачки импульсов.
Промежутки между ними – «такты». Я их обозначил жирными точками. Таким образом, если реальная шестерня будет иметь 33 зуба( соответственно датчик за полный оборот считает 33 импульса) Соответственно – точка В (начало первого зуба); точка D (начало следующего зуба)- будет соответствовать повороту коленчатого вала на угол 10,9град. Время за которое, коленвал повернется на этот угол и будет период следования импульсов в импульсной последовательности датчика. Но есть промежуток между зубьями шестерни: точка С (конец первого зуба) – точка D( начало следующего зуба)-это уже частота повторения импульсов в импульсной последовательности с датчика.
48) Если мы устанавливаем ремень ГРМ – все эти временные промежутки НЕ нужны. Просто метки ставятся по месту, крышка закрывается – и до следующего раза. И дискретность для шестерни будет 5,45град.(зуб -5,45, промежуток- 5,45)
49) А для « Виртуальной шестерни» дискретность будет уже определяться генератором тактовой частоты. Но и здесь возникает вопрос : -«А ради чего?». Только лишь для того чтобы вместо 66 дискретных точек получить 8000. Импульсная последовательность с датчика тоже дискретна. Начало- конец импульса, промежуток, начало следующего импульса……….. Маркер( это полный оборот), а это конец импульсной последовательности, и начало следующей.
50) Зачем? Вводная часть хоть и в общем, но давала основные понятия.
Подозреваю, что многие восприняли там некоторые слова, как употребляемые для «связки» и для «красоты слога», а некоторые практики - «голой теорией». Поэтому идем далее.
51) Импульсные последовательности от датчика во время работы двигателя могут меняться неоднократно и в любой момент времени. ( меняется длительность импульса и период следования(частота повторения)
52) Генератор тактовой частоты выдает постоянную последовательность импульсов(в этой последовательности ничего не меняется).
53) А отсюда вопрос: - Почему на графиках импульсы генератора тактовой частоты всегда совпадают с фронтом(началом импульса идущего от датчика) С задним фронтом- конец импульса…. И т.д.?
54) Отвечаю: такое совпадение происходит, носит оно случайный характер и существует в очень короткий промежуток времени. На графиках изображаю – для наглядности и понимания общей сути. Реально - может быть так:
55)
56) Или вот так:
57)
58) И так:
59)
60) И так конечно:
61)
62) Много еще как…. И это реальность. А график рисуется для общего понимания процесса.
63) Точность. Достоверность.
64) Были в начале слова такие…. Теперь, что они означают.
65) Мы имеем объект управления ДВС. Это чисто механическое устройство.
66) Мы имеем систему управления. Это электроника.
67) Система управления не связана на прямую с механизмами двигателя. Она получает информацию от промежуточных устройств, (датчики различного типа ). А между датчиком и механизмом двигателя тоже кое-что в промежутке есть, (та же пластина, шестерня.)
68) Какова точность импульсной комбинации полученной с датчика. Соглашусь, что точнее, чем информация от сравнения метки с отзывом. Но не более.
69) Дискретизация сигнала от датчика дает возможность, получить на том же импульсе от зуба не две информационных точки (начало-конец), а и множество точек в промежутке между двумя точками, соответствующих определенным значениям.
70) А информация с датчика по отношению к шестерне, будет точнее только в том плане, что будет точнее определяться начало и конец импульса, начало и конец комбинации (полный оборот). И делаться это будет уже не по метке и отзыву, а по точкам переднего и заднего фронтов импульса. А в остальном – это будет та же шестеренка с 33 зубьями.
71) Проводя просечку импульсного сигнала от датчика и получая дополнительные информационные точки, мы повышаем точность при считывании информации. И считываемая информация будет более достоверна.
72) Это механик , когда ГРМ метки сверяет, может сказать: -« Совпадает….. Ушла на один зуб….Ползуба…… ну, в принципе нормально» .Для системы управления такая точность и такие определения не пойдут. Вот механик может сказать, если расхождение на один зуб – сколько это будет в градусах. Но я не знаю такого человека , который бы ответил – а насколько мм при этом сместиться поршень в цилиндре?
73) Можете своих механиков проверить. Придите утречком и так между прочим, но серьезно поинтересуйтесь- « Иваныч, подскажи, на сколько в градусах будет ошибка по КВ если метка не дойдет до отзыва на 1\40 зуба? А когда у него челюсть отвиснет , немножко усугубите: « и сколько мм в этом случае поршень не дойдет до ВМТ?» Только не увлекайтесь, к кулачкам распредвала переходить не стоит и обстановку контролируете, ваши вопросы могут истолковать неверно . и в самом простом варианте – вызвать «неотложку.» А вот система , благодаря тому что появилось огромное количество дискретных значений положения того же коленвала при вращении- если бы могла говорить , то ответила бы.
74) Это, точность.
75) Теперь достоверность.
76) Я говорил в общей части, что это также параметр и очень важный для системы.
77) Системе нужна достоверная информация. Она, как отмечалось ранее - заданная. (Достоверность информации в системе, о которой говорим мы, ничего общего с названием раздела на известном сайте не имеет.)
78) Рисуем.
79)
80) Рис.1-3- дискретный сигнал(пачки импульсов).Красным пунктиром обозначена огибающая, чтобы было понятно как выглядит исходный сигнал.(Привычный для всех сигнал с датчика)На этих рисунках видно , что обороты увеличиваются. В первичном сигнале изменятся два параметра импульсной последовательности: длительность импульса и период повторения (см. огибающую). В дискретном сигнале, в импульсной последовательности меняется только один:- период повторения. Длительность импульсов остается неизменной, т.к. это импульсы генератора тактовой частоты. Но изменяется количество импульсов в пачках. Количество импульсов в пачках - есть длительность импульса исходного сигнала. (см. огибающую). До каких пор можно увеличивать скорость вращения, ведь система должна четко различать - начало и конец импульса; начало и конец импульсной комбинации? (См. рис.4. Тот же сигнал, но сделал крупнее масштаб). Ответ: - Система будет различать точки фронтов (начало и конец действия)импульса, когда в пачке импульсов дискретного сигнала будет хотя бы три импульса тактовой частоты; Система будет различать следующий импульс в дискретной последовательности, когда между пачками импульсов ,будет хотя бы один такт генератора тактовой частоты; Система будет точно определять начало и конец импульсной комбинации (полный оборот), когда сигнал маркера будет отличаться хотя бы на один такт от временного промежутка между пачками импульсов, (выделено на рис.4 жирными штрихами). А теперь вспомните частоты тактовых генераторов. Так с какой скоростью должны проходить зубья шестерни и маркера на ней точку датчика, чтобы во временные промежутки прохода каждого уложилось указанное количество импульсов и тактов? Высчитать можно. А вот мотор до таких оборотов не раскрутите. Это не все. Прямоугольный импульс – это слишком просто. Усугубим ситуацию, пора уже.
81)
82) Хотел сначала взять реальный сигнал от ДК. Но не стал усложнять. Рис.1 – Аналоговый сигнал- действует непрерывно ,в течении времени меняет свои амплитудные значения.(на рис. черным цветом). Там же я нарисовал точки, с которых мы будем брать мгновенные значения. Вопрос: Скажите, того количества точек, которое я обозначил, достаточно для того по ним получить достоверную информацию об изменениях сигнала? Те, кто сказал: - «ДА» или «НЕТ»- ответили не верно. Мы не знаем степени заданной достоверности. А поэтому может быть и «ДА» и «НЕТ». Линией зеленого цвета я соединил выделенные мною точки и немного приподнял их выше, для наглядности. Теперь смотрим на рис.2. Это импульсы генератора тактовой частоты. И вот с частотой следования импульсов я выделю точки дополнительно, к тем, что уже есть на рис.1.Спроэктируйте каждую черточку с рис.2 на рис.1. и решите сами, где информация будет более достоверной. А теперь вернемся немного назад - рис.4-6. На рис. 4- сигнал, который достиг предела, на котором система пока еще получает достоверную информацию. Но этот дискретный сигнал получен в результате первого преобразования (просечка выполнена генератором тактовой частоты№1.)И что получается, еще чуть-чуть и сбой, ошибка? На рис.5- генератор тактовой частоты №2. Выполняем просечку уже дискретного сигнала этим генератором. Что получаем? Правильно, «Виртуальную шестерню №2» рис.6. Каждый импульс в пачке и все временные промежутки разбиваются еще на информационные точки. Частота следования импульсов генератора тактовой №2 частоты выше, чем у первого. А у третьего будет выше, чем у второго. Третью «виртуальную шестерню» рисовать не буду те, кто понял, сделают это сами, если будет желание.
83) А теперь вернемся к нашему аналоговому сигналу ДК. Все видели, как он выглядит и не раз. И от двух датчиков одновременно, тоже видели. И если смотреть сигнал от двух ДК одновременно, будет заметно некоторое отставание сигнала второго датчика. О степени дискретизации с помощью трех генераторов, говорить не буду. Скажу о другом: - это отставание позволяет детализировать те участки сигналов, которые оказались между дискретными точками. А теперь еще: - а если второй датчик заставить работать немного по- другому, чем первый. Пусть он начинает отсчет с какого-то определенного уровня. Интересная картина получится. Попробуйте , нужен всего лист бумаги и огрызок карандаша.
84) И теперь, опять немного назад, там, где были графики с несовпадениями фронтов импульсов исходного сигнала и импульсов тактовой частоты. Реально, такое совпадение вообще случайность.
85) Одну картинку я повторю
86)
87) Скажите, учитывая конечную степень дискретизации исходного сигнала, система сможет поправить такое несовпадение? Да. Эти погрешности будут компенсированы по принципу «наибольшая вероятность. Рисовать ничего не буду .Проще изобразить картину «Три медведя» на рисовом зерне. Лучше напишу.
88) Все просто - пункт №1- полная законченная фраза. В последующих пунктах я буду убирать по одному слову. По оставшимся словам нужно восстановить первоначальную информацию.
89) 1.Администратор форума сайта Легион-Автодата Кучер Владимир Петрович. i) Здесь достоверная полная информация
90) 2.Администратор форума сайта Легион-Автодата Кучер Владимир………….
91) Здесь части информации нет или она искажена- восстановить ее легко
92) Администратор форума сайта Легион-Автодата Кучер…………………………..
93) Здесь нет большей части информации, чем в предыдущем пункте или она искажена, но восстанавливается без проблем
94) Администратор форума сайта Легион-Автодата ……………………………………
95) Здесь еще больше- но восстановить можно
96) Администратор форума сайта Легион……………………………………….
97) А это уже зона неопределенности, сайт, начинающийся со слова «Легион» может быть не один. Мы еще с вами можем «погадать»- Система никогда ничего угадывать не будет.
98) Администратор форума сайта…………………………………………………………….
99) Здесь уже и гадать нечего.
100) Вот система и ориентируется на «виртуальные шестеренки». Если импульсы и такты первой немного не совпадают, то вторая подсказывает «на сколько». И система правильно ставит точку. Поэтому в системах управления генератор не один, а несколько. И кратность , обратите внимание на кратность- 8000, 12000, 16000……. Вот здесь точно ничего не буду объяснять. Сам кто захочет, разберется.
101) Осталось объяснить, что такое такты. Такт в системе управления – это временной промежуток между передним фронтом импульса генератора тактовой частоты и передним фронтом импульса следующего за ним. Поэтому на вопрос о «зонах неопределенности», отвечаю, таких зон нет. Есть временные промежутки, в которых нет импульсов, но в них по времени укладывается определенное количество тактов. В системе все делается по тактам, тем более в процессоре. Один такт одно действие. Запись, считывание, запрет, перезапись, выдача любой команды - абсолютно все. Задающие генераторы тактовой частоты для всей системы едины.
102) P.S. Если мне удалось дополнить и объяснить то должно стать понятным:
103) - в системе управления приведено все к одному параметру(время).
Неважно получение это системой информации от датчиков или выдача ею команд управления. В первом случае система использует мгновенные временные (ударение на последний слог)значения показаний датчиков; во втором выполняет временные коррекции: топливо, зажигание, воздух. Поэтому для системы не существует никаких других величин измерения. Это и есть простота управления.
104) Получение системой множества мгновенных значений, даже в короткие временные промежутки позволяют получить высокую степень достоверности, получаемой информации. Дальнейшее преобразование импульсных последовательностей в логические последовательности «1» и «0» позволяет быстро обрабатывать информацию и выдавать команды управления.
105) Высокая степень дискретизации сигналов от датчиков, обеспечивает высокую точность системы в привязке к механизмам ДВС.И позволяет учитывать не только заложенные допуски и люфты и т.д. в механизмах ЦПГ и ГРМ, но и определять «допустимую степень их износа». Например, если есть несовпадение фронтов импульсов от датчиков ДПКВ ИДПРВ, на том же Ниссане после замены цепи, то это говорит лишь о том, что имеет место быть износ в других элементах ГРМ и ЦПГ. И это обстоятельство просто не позволяет точно установить метки. Но это вовсе не говорит о работоспособности. Пока погрешность такова, что не выходит за границы полосы регулирования - система справляться будет уверенно. Анализировать же по сигналам датчиков степень влияния такого расхождения, сможет только опытный диагност. Да и то в подобных ситуациях даже у опытного, верх берет все же интуиция. Точно же определить «запас прочности», можно только посмотрев временные промежутки и пачки импульсов в них.
106) Вся информация и команды, формируемые системой - приводятся к простейшему виду электрических сигналов. Импульсы и их последовательности, в системе управления не содержат никаких составляющих внутри себя. Модуляция таких сигналов – невозможна. В системе существует импульсная манипуляция. (Но об этом позже. Это сигналы управления.)
МАРКИН Александр Васильевич
г. Белгород
Таврово мкр 2, пер. Парковый 29Б
(4722) 300-709

Обсуждение статьи на форуме: http://forum.autodata.ru/7/13479/

 (июнь 2025)")





