Автоматизированная система управления или работа двигателя и управление его работой в понимании обыкновенного автомобильного диагноста,- ст. из г. Белгорода, часть 3
31.05.2009
Часть 3
Продолжение. Начало см. в части 1 и 2
…Был случай, когда человек описывал неисправность и, рассматривая конкретную ситуацию, обратил внимание на некий «выброс» на осциллограмме импульса управления форсункой. Он предположил, что это – результат «подвисания» иглы во время ее обратного хода. Оказывается, такой выброс есть на всех осциллограммах импульсов управления форсункой. Но спора и дискуссии в ходе которых, можно было выяснить действительную причину не было. Было высмеивание и даже не позиции, а самого человека. Поэтому вопрос остался открытым. Давайте попробуем подойти к ситуации с другой точки.
Классифицируем:
1. Форсунка - исполнительный элемент в системе впрыска. Задача - впрыск топлива в количестве определенном системой. Конструкция - электромеханическая деталь, специального исполнения. (Соленоид со специальной формой сердечника). Внутренний механизм при всей кажущейся простоте должен обеспечивать:
- четкое открытие (впрыск)
- и такое же четкое закрытие (отсечка).
2. Управляющий элемент форсунки. Конкретное электронное устройство. Задача: с поступлением на вход импульса управления, сформировать импульс управления форсункой нужной мощности, установленной длительности и определенной формы. Ибо это позволит обеспечить четкую работу механизма форсунки.
А теперь отвечаем на вопросы, которые вытекают из вышесказанного.
Как «зовут» управляющий элемент форсунки? Ключевой транзистор? Ну, он включит питание на форсунку, сколько там, в бортовой сети его будет? Достаточно будет 10…12…13….В.
А если еще учесть характер нагрузки? Что-то «не срастается». Но понятие «ключевой транзистор», как бы уже прижилось, и говорим это просто на автомате. Есть еще одно слово «драйвер» - этим словом можно подменять все, когда не знаешь, с чем имеешь дело. «Драйвер» применим, на мой взгляд, только в одном месте - когда идет разговор о программе ПК, обеспечивающей «продвижение» (управление) к периферийным устройствам: сканеру, принтеру и т.д.
Но, классифицируя, мы два пункта для себя отметили. Поэтому последовательно идем дальше.
А если представить себе, что управление форсункой выполняет некий транзисторный каскад, задача которого и состоит в формировании из слабого приходящего управляющего импульса - мощного импульса на управление форсункой. И не просто мощного импульса, а определенной формы, с лавинообразным нарастанием амплитуды по фронту. Именно такой импульс обеспечит мгновенное срабатывание форсунки. А назад ее вернет пружина (внутренний механизм). Так вот, «фамилия» прапрадедушки такого каскада: «блокинг-генератор». Устройство довольно известное в импульсной технике.
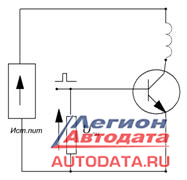
Конструктивных вариантов такого каскада существует достаточно. И в подобных каскадах транзистор удерживается в режиме отсечки, соответственно подобранным напряжением смещения. При этом напряжение коллектор-эмиттер делается меньшим, чем база–эмиттер. А база - коллекторный переход остается обратносмещенным. В области базы накапливается заряд, при определенном значении его возникает цепь для тока короткого замыкания - источник питания, индуктивность включенная в коллекторно – эмиттерный переход, (форсунка наша) и переходы транзистора – рис. справа
|
|
|
|
|
|
Для ключевого транзистора такая задача не по силам.
А какое это имеет отношение к чисто механическому процессу, скажете вы.
Давайте и это попробуем связать…
- Нам нужно, чтобы форсунка открылась в момент прихода импульса.
Нужный передний фронт импульса мы обеспечили.
Действие импульса происходит в течение какого-то времени.
Но нам нужно, также четко и закрыть форсунку (отсечь топливо).
Вот здесь уже немаловажную роль играет механизм самой форсунки. Игла находится в верхнем положении, возвратная пружина сжата. А теперь вопрос - когда игла пойдет вниз под воздействием пружины? Когда закончится действие импульса? Критик утверждал именно так: «игла идет вниз, когда тока в обмотке уже нет». А может быть чуть раньше, когда уменьшение амплитуды в заднем фронте импульса достигнет некоторого значения, и сила магнитного потока станет меньше чем сила, воздействия возвратной пружины? Но тогда игла начнет движение, когда ток в обмотке еще есть.
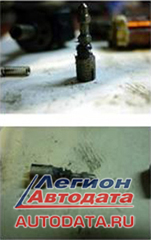
На фото справа игла форсунки. Она намагничена. Это магнит. И движение его происходит внутри катушки. А, учитывая то, что сказано выше, можно утверждать, что движение иглы (магнита) вызовет импульс тока. Я сказал о блокинг-генераторе. У него и у транзисторного каскада управляющего форсункой, будет, мне кажется, нечто общее. Положительная обратная связь, а значит, очень слабый импульс будет усилен. А местоположение его определяет наступление механической отсечки.
Вот так бы я объяснил это. Возможно, кто-то сможет дать и другое пояснение.
А вот что написано по этому поводу.
**********
Точка Е переносит нас к очень интересному участку. Как вы можете видеть, напряжение снижается до уровня опорного после пика индуктивного удара.
Видите небольшой бугорок? Это момент реального закрытия иглы инжектора. Другими словами, движение металлического сердечника сквозь магнитное поле создаст ЭДС. Здесь игла является металлическим сердечником. Этот бугорок в точке "Е" должен находится в конце нисходящего участка кривой напряжения, и не позже. Если бугорок расположен после того, как кривая напряжения стабилизировалась, это означает, что игла слегка «приклинивает» из-за механических помех.
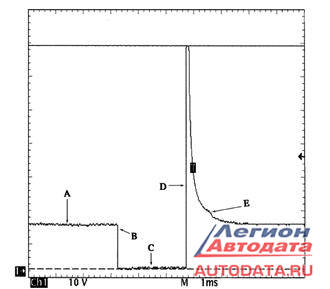
*** Вот так будет примерно выглядеть, если на индуктивную нагрузку подать прямоугольный импульс. Из прямоугольного он превратится в такой, как на рисунке. Процесс насыщения не идет по прямой вверх. А равно, как и достигнув максимального значения, не обрывается резко. Но такой формы импульс на управление форсункой не нужен. Но делать нечего и нужно управлять тем, что есть. Поэтому поступают просто. Магнитное насыщение длится некоторое время (определено длительностью импульса). Когда действие импульса прекращается, происходит обратный процесс. И идет он по той же кривой и за тоже время. Поэтому левую часть рисунка я заштриховал. Она не нужна - она свою задачу выполнила. Теперь смотрите: черная жирная линия, я ее провел посередине. Вот импульс управления. Сравните с реальными импульсами управления форсункой. А вот задний фронт остался, и он повторяет процесс возврата катушки в исходное состояние. Нужен нам такой задний фронт? Нет. Нам нужно также четко отсечь топливо. И это делает механизм форсунки - подпружиненная игла. И вот если игла форсунки «поперек встанет или в воздухе повиснет», никакого выброса в точке « А» не будет. Именно это точка механической отсечки. Многие вспомнят случаи из практики связанные с неисправностью форсунок. А именно, когда изменение сопротивления (R) катушки соленоида приводило к неправильной работе всей системы впрыска. Потому что меняется время процесса насыщения и возврата в исходное состояние. А коррекции по топливу в системе управления – временные. И если вы где-то увидите объяснения типа: « …..MAF посчитал 10 кг воздуха, значит, форсунка подаст – столько-то кг. топлива» Неверно, Господа…
Но смысл один - в системе все связано и рассматривать процессы управления, вырвав один какой-то частный пример, и рассматривать его с целью понять общую физику происходящего нельзя.
Продолжаем дальше.
Зачем нужны все эти преобразования сигналов, пока не очень понятно. Приведение к общему виду и только? Ну, получили мы дискретные значения сигналов, преобразовали их в последовательность «0» и «1». А дальше что?
Я выше говорил о просечке сигналов от датчиков импульсами генератора тактовой частоты. С синхронизацией механической части и электронной все понятно. Мгновенные значения получили. Теперь давайте дальше.
Если преобразовывать уже дискретный сигнал далее и сохранять заложенную в нем информацию, то просечку его нужно выполнить «генератором «1». И частота просечки уже будет другой. Мы по мере преобразования сигнала приближаемся к процессору. А скорость обработки и пр. в нем значительно выше. И привязывать все к одной тактовой частоте нельзя, мы проиграем в самом главном - в быстродействии системы.
Порисуем еще.
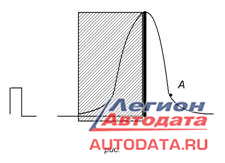
На рисунках справа имеем импульс.
Рис.2 это его дискретные значения, после просечки генератором тактовой частоты. Хорошо видно, что по этим значениям импульсный сигнал восстанавливается и информация не теряется. Рис.3: не расписывая процесс преобразования, он похож на описанные выше, мы дискретные сигналы преобразовываем в последовательность «1»и «0». И даже после этого преобразования, видим, что информация, заложенная в импульсе сохранена.
***
Дальше. Смотрим рисунки справа:
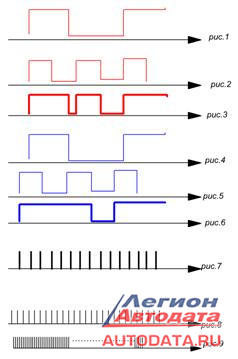
Рис.1, рис.2 – допустим, импульсный сигнал датчиков. Рис.3 - результирующий сигнал от наложения импульсных последовательностей. Это первый этап проверки системой – «на лояльность». Очевидно, что длительность импульсов не изменится, даже при изменении режимов работы (красный цвет).
Рис.4. рис.5 - тот же сигнал, но есть рассогласование (допустим растянута цепь ГРМ). Рис.6 - результирующий сигнал для этой ситуации. Изменилась длительность импульсов. Это ошибка (синий цвет). Но вычислять ошибку по длительности импульсного сигнала - дело неблагодарное. Да и процесс вычисления, и точность,- для автоматизированной системы такой вариант не подходит.
Рис. 7, рис. 8, рис. 9 - тактовые частоты. Я их показал здесь уже несколько. На рис. 7- пусть будет генератор выполняющий «просечку» импульсных последовательностей. Процесс преобразования мы уже рассматривали. Поэтому его пропускаем и говорим: рис.8, рис.9 - тактовые частоты именно для цифрового сигнала. Причем я их показал разными. Частота дискретизации значительно выше той, которая применялась на первом этапе преобразования. А это значит, что точек, по которым система ориентируется, анализируя сигнал - больше. А значит, будет точнее. А поскольку это не электрические импульсы - быстрее. И именно в этой части ЭБУ, основные «барьеры» для помех, искажений, неправильных комбинаций и пр. Это не «не фейс контроль» на входе - это посерьезнее будет.
Если говорить, насколько мы приблизились к процессору, рассматривая написанное - и полшага не прошли. Пока только находимся в той части где АЦП (аналоговое - цифровое преобразование) и ЦАП (цифро-аналоговое преобразование). Да и то пока в одну сторону движемся и до конца еще не дошли. А на «красной линии» - перед процессором мы остановимся и рассмотрим уже в обратную сторону: как сигналы управления «1» и «0» становятся электрическими сигналами управления.
А дальше… будет, как перейти от привычной для нас десятичной системы в двоичную и зачем это нужно. Будет логика, будут конкретные устройства… в общем дальше будет.
В данном материале даются только общие понятия и принципы. Конструктивные отличия не рассматриваются.
Принцип: от общего – к частому; от простого - к сложному.
МАРКИН Александр Васильевич
г. Белгород
Таврово мкр 2, пер. Парковый 29Б
(4722) 300-709

Обсуждение на форуме: http://forum.autodata.ru/7/13226/

 (июнь 2025)")





